
INA-Berechnungsprogramm
Die Tragzahl-Berechnung dient der Vorauswahl der Profilschienenführungen. Sie ermöglicht eine überschlägige Berechnung der äquivalenten statischen und dynamischen Lagerbelastung.
BEARINX zur exakten Auslegung
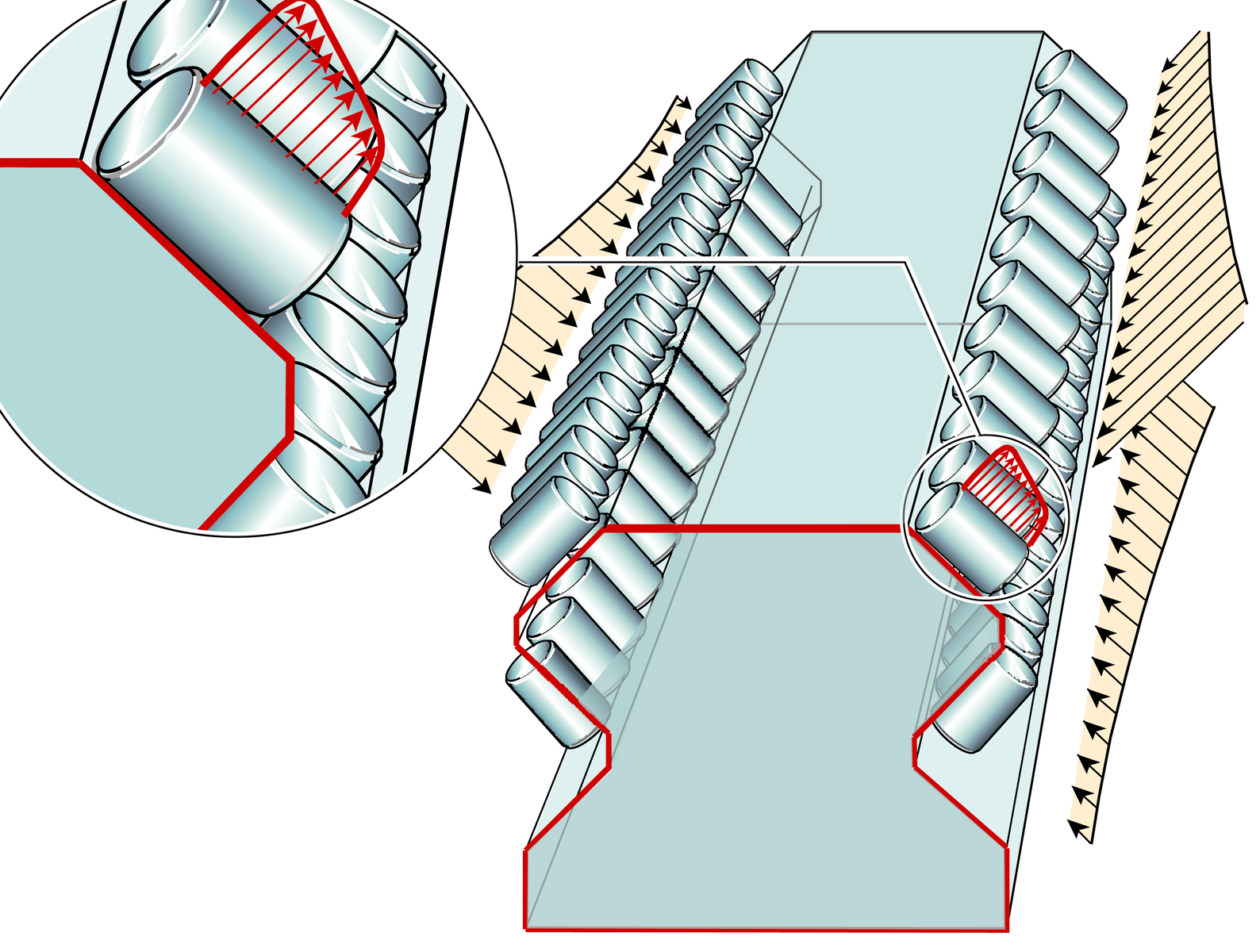
Zur exakten Auslegung der Linearführungselemente in Bezug auf die nominelle Lebensdauer und statische Tragsicherheit müssen die Lagerbelastung im statisch unbestimmten System und die innere Lastverteilung der Linearführungselemente berechnet werden (Belastung der einzelnen Wälzkörper, ➤ Bild). Das setzt ein komplexes Berechnungsverfahren voraus.
Aus diesem Grund wurde das Wälzlager-Analyseprogramm BEARINX entwickelt, mit dem Linear- und Führungselemente innerhalb des Gesamtsystems (zum Beispiel Werkzeugmaschine) berechnet und somit sicher ausgelegt werden können.
Innere Lastverteilung bei kombinierter Belastung
BEARINX-Linearmodul
Im Linearmodul von BEARINX können Linearführungselemente in mehrachsigen Systemen unter beliebig kombinierter Last durchgängig bis zum Wälzkontakt berechnet werden. Mit Hilfe des integrierten Analyseverfahrens kann der Einfluss nahezu aller Parameter des Gesamtsystems auf relevante Ergebnisse gezielt untersucht werden.
Elastizitäten im System berücksichtigt
Hierbei werden in einem aufwändigen Berechnungsmodell alle Elastizitäten im System, von der Steifigkeit der Tragkörper und der Führungsschienen bis zum nichtlinearen Federungsverhalten der Wälzkörper, berücksichtigt.
Um bei Rollenumlaufeinheiten die Pressung zwischen Wälzkörper und Laufbahn noch exakter ermitteln zu können, wird zusätzlich die Endprofilierung der Wälzkörper berücksichtigt. Die Anschlusskonstruktion wird im ersten Ansatz als starr angenommen, kann aber bei Bedarf über reduzierte Steifigkeitsmatrizen (zum Beispiel aus der FE-Rechnung) elastisch modelliert werden.
Sehr genaue Ergebnisse
Dieses Modell ermittelt wesentlich genauere Resultate als Programme, die nur die Elastizität im Wälzkontakt berücksichtigen. Und das gibt mehr Sicherheit in der Auslegung.
BEARINX ermöglicht die Berechnung von Systemen mit beliebiger Anzahl an: Verfahrachsen, Linearführungselementen und Linearantrieben, Lastsituationen, Belastungen und Massen.
Als Ergebnis liefert BEARINX unter anderem die statische Tragsicherheit, die nominelle Lebensdauer und die Verlagerungen, die aus der Elastizität der Lagerung resultieren.
Die Berechnung mit BEARINX gibt es als Service.
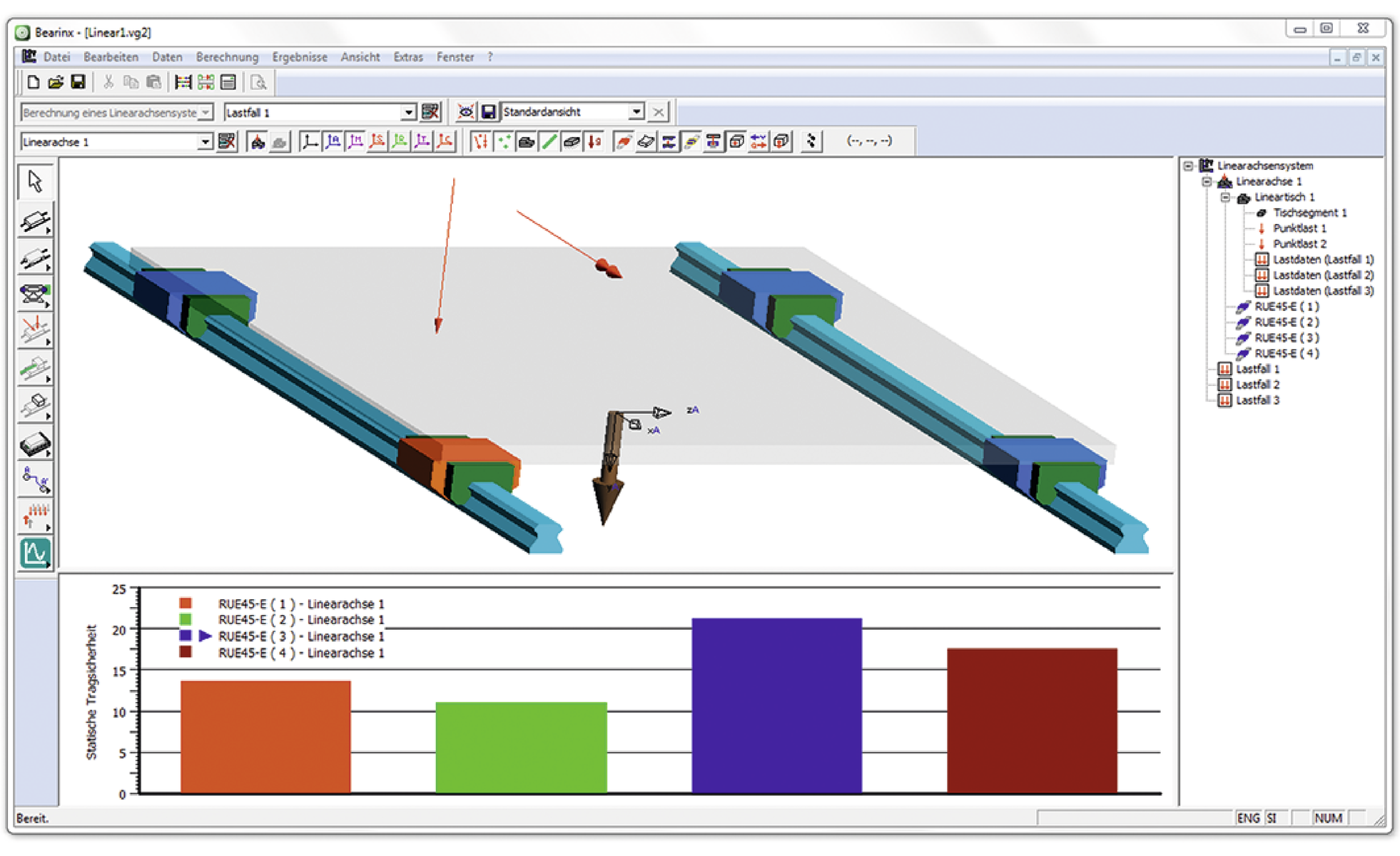
Linear BEARINX online
Das Linearberechnungs-Programm BEARINX online hilft bei der Berechnung und Auslegung der Linearführung, ➤ Bild. Die Benutzung ist gebührenpflichtig.
Info und Anmeldung http://www.schaeffler.de/std/1F2C.
Beispielseite aus dem Online-Programm
Berechnungsprogramm – Beispiel für die Eingabedaten eines Lastenheftes
Die Eingabedaten für das Berechnungsprogramm sollten anhand des Lastenheftes (übersichtlich bemaßte Zeichnungen oder Skizzen in mindestens zwei Ansichten) zusammengestellt werden. Eine Schritt-für-Schritt-Anleitung zeigt am einfachen Beispiel die Vorgehensweise der Bemaßung.
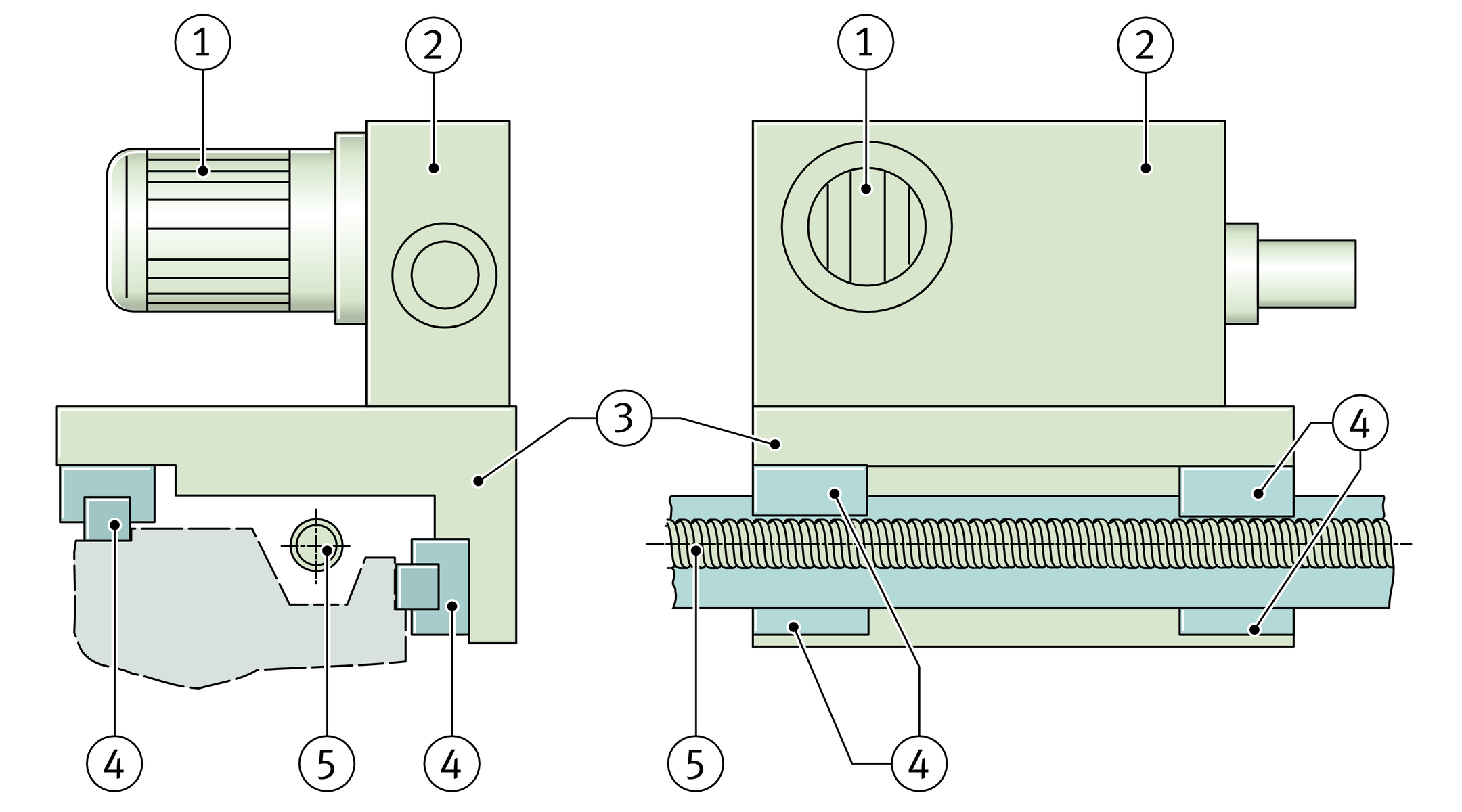
1. Schritt
Bauteile festlegen
Relevant für die Berechnung sind neben den Linearführungselementen und dem Antrieb des Schlittens die Bauteile, aus denen Belastungen auf die Linearführungselemente entstehen (Eigengewicht der Bauteile oder deren Trägheitskräfte), ➤ Bild.
Bauteile festlegen





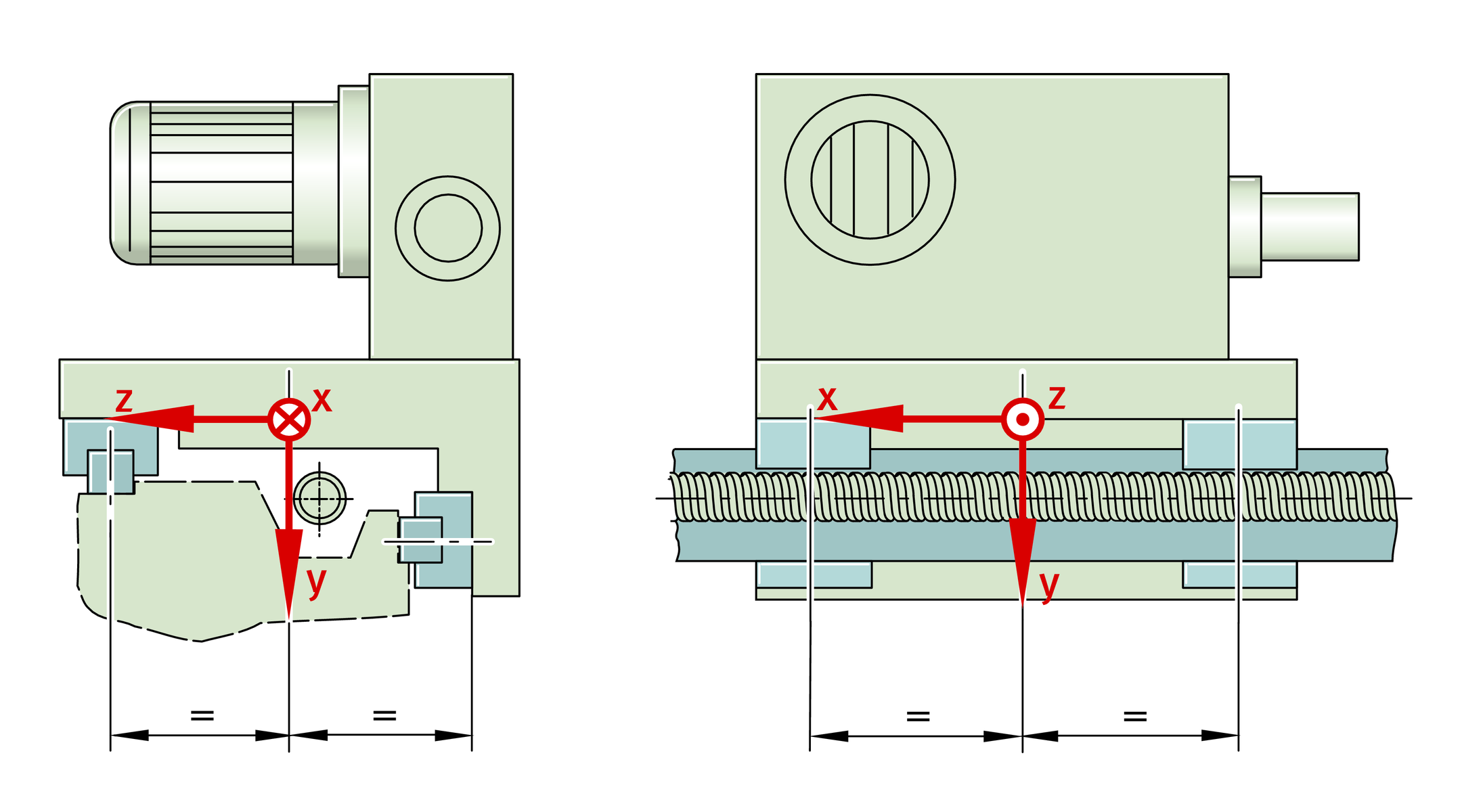
2. Schritt
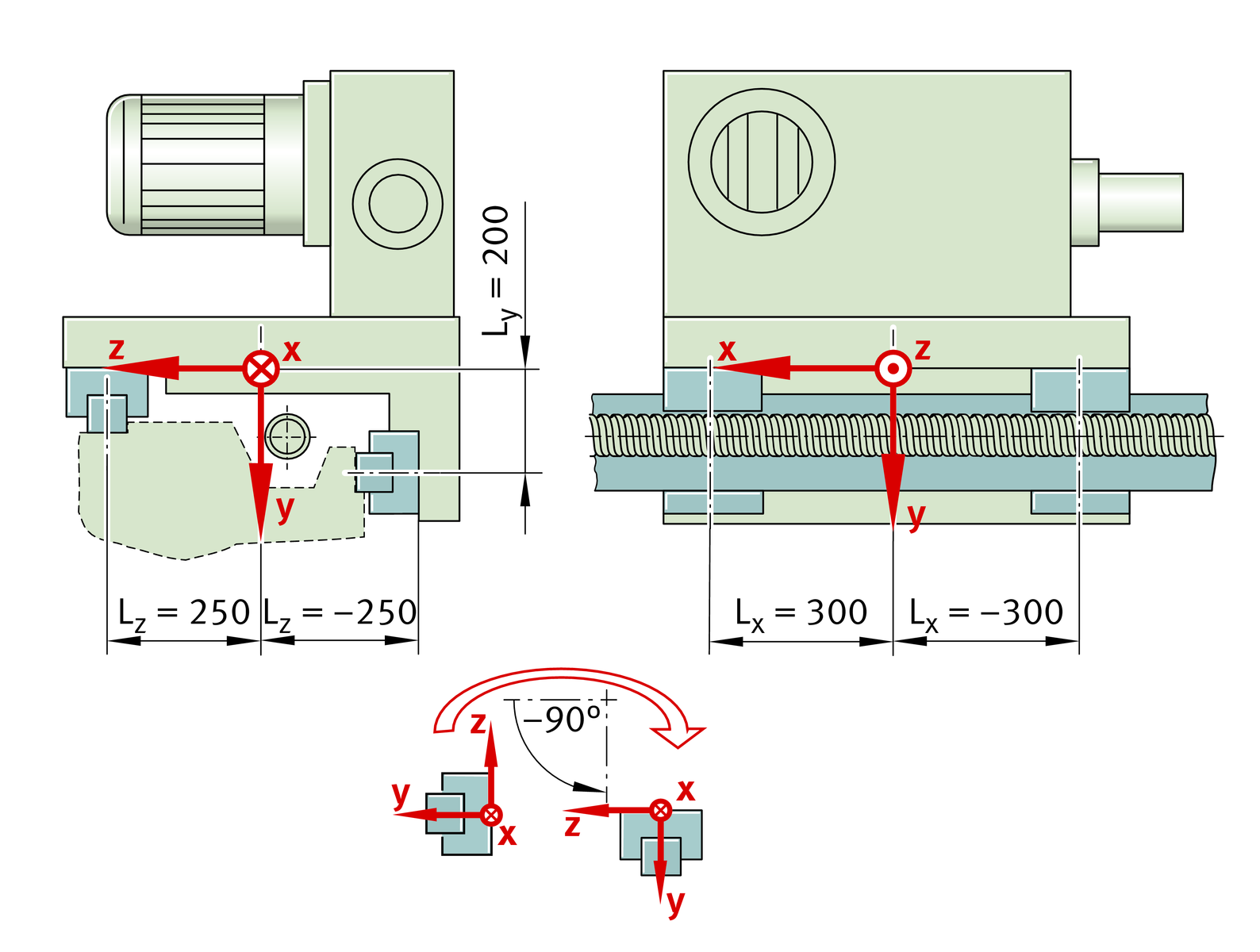
Tisch-Koordinatensystem festlegen
Das Tisch-Koordinatensystem ist kartesisch, rechtshändig.
Für die Richtungen des Tisch-Koordinatensystems gilt, ➤ Bild :
- X‑Achse: Verfahrrichtung des Tisches
- Y‑Achse: Hauptlastrichtung auf das System (Richtung der Gewichtskräfte)
- Z‑Achse: ergibt sich aus der Rechten-Hand-Regel (seitliche Richtung).
Die (translatorische) Lage des Tisch-Koordinatensystems kann beliebig gewählt werden. Empfohlen wird, diese mittig zwischen die Führungswagen der Richtungen X und Y zu legen.
Tisch-Koordinatensystem festlegen
3. Schritt
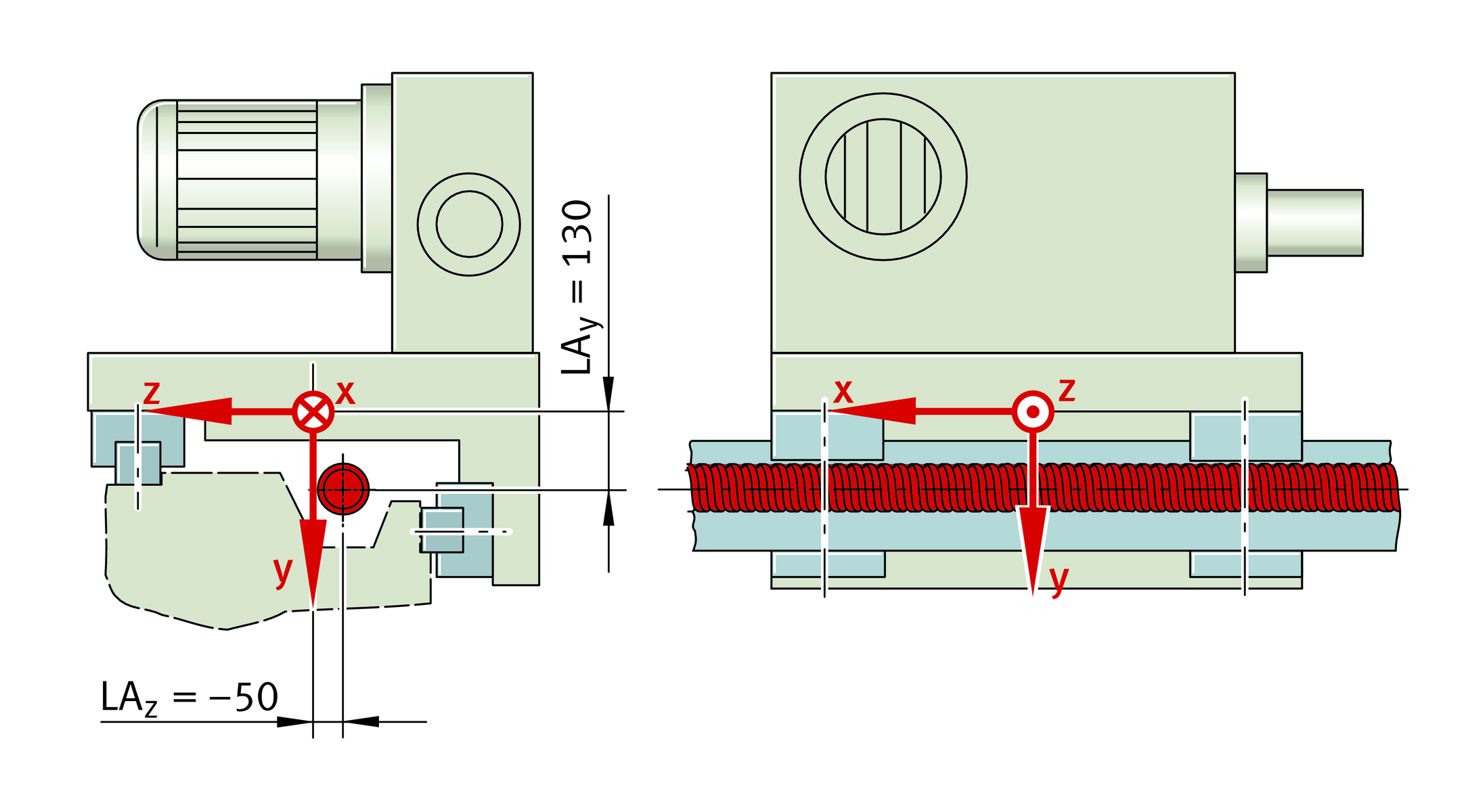
Position der Linearführungselemente festlegen
Die translatorische Lage der Linearführungselemente wird bezogen auf das Tisch-Koordinatensystem angegeben. Zur Ermittlung der Verdrehwinkel der Linearführungselemente wird deren Koordinatensystem um die X‑Achse in das Tisch‑Koordinatensystem gedreht, ➤ Bild.
Position der Linearführungselemente festlegen
4. Schritt
Position der Antriebe festlegen
Die translatorische Lage der Antriebe (Stützfunktion in Verfahrrichtung) wird bezogen auf das Tisch-Koordinatensystem als Y‑ und Z‑Koordinate angegeben, ➤ Bild.
Position der Antriebe festlegen
5. Schritt
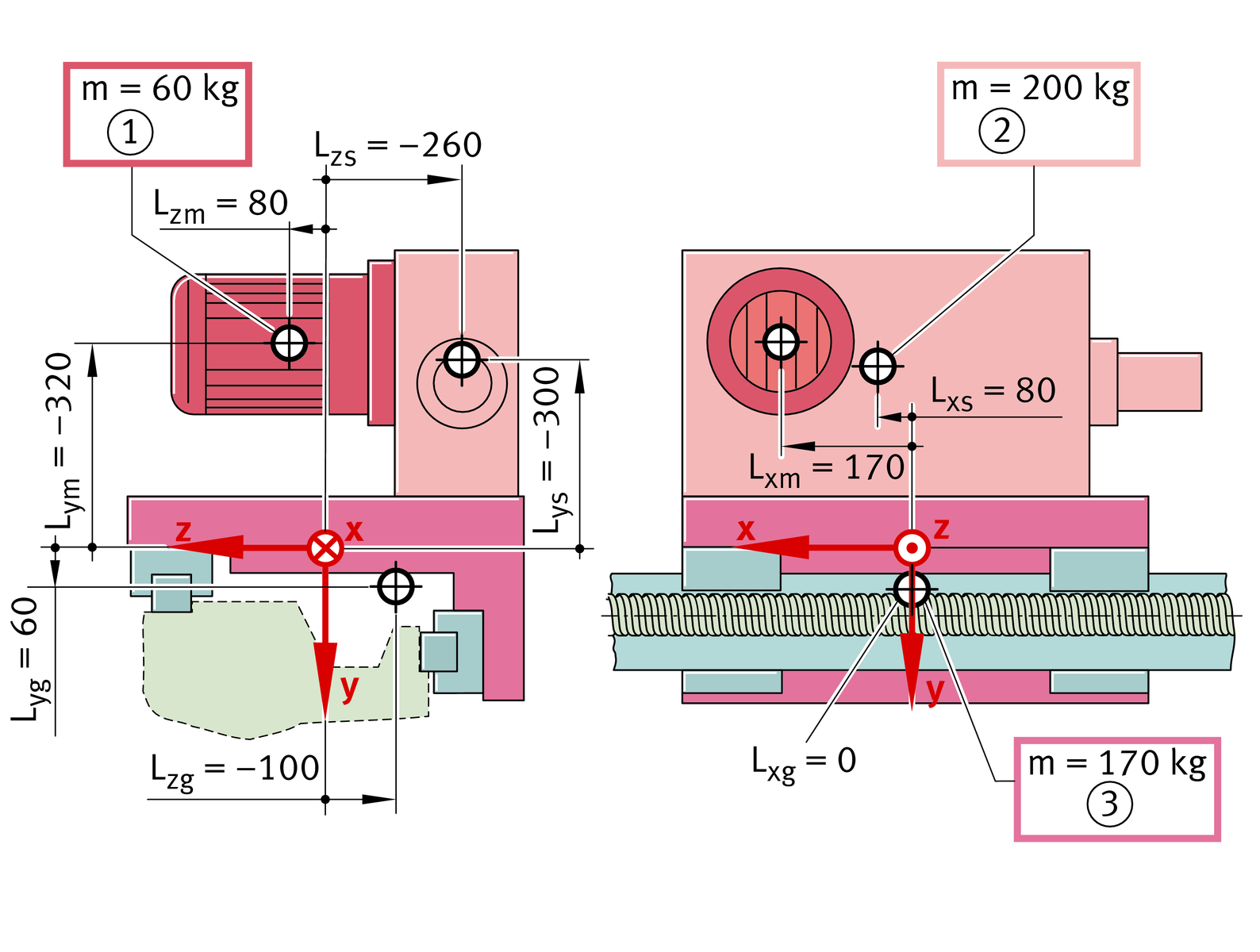
Massenschwerpunkte der Bauteile festlegen
Die Masse der Bauteile wird auf einen Massenpunkt in deren Schwerpunkt konzentriert.
Die translatorische Lage der Schwerpunkte wird wiederum bezogen auf das Tisch-Koordinatensystem angegeben, ➤ Bild.
Massenschwerpunkte der Bauteile festlegen
6. Schritt
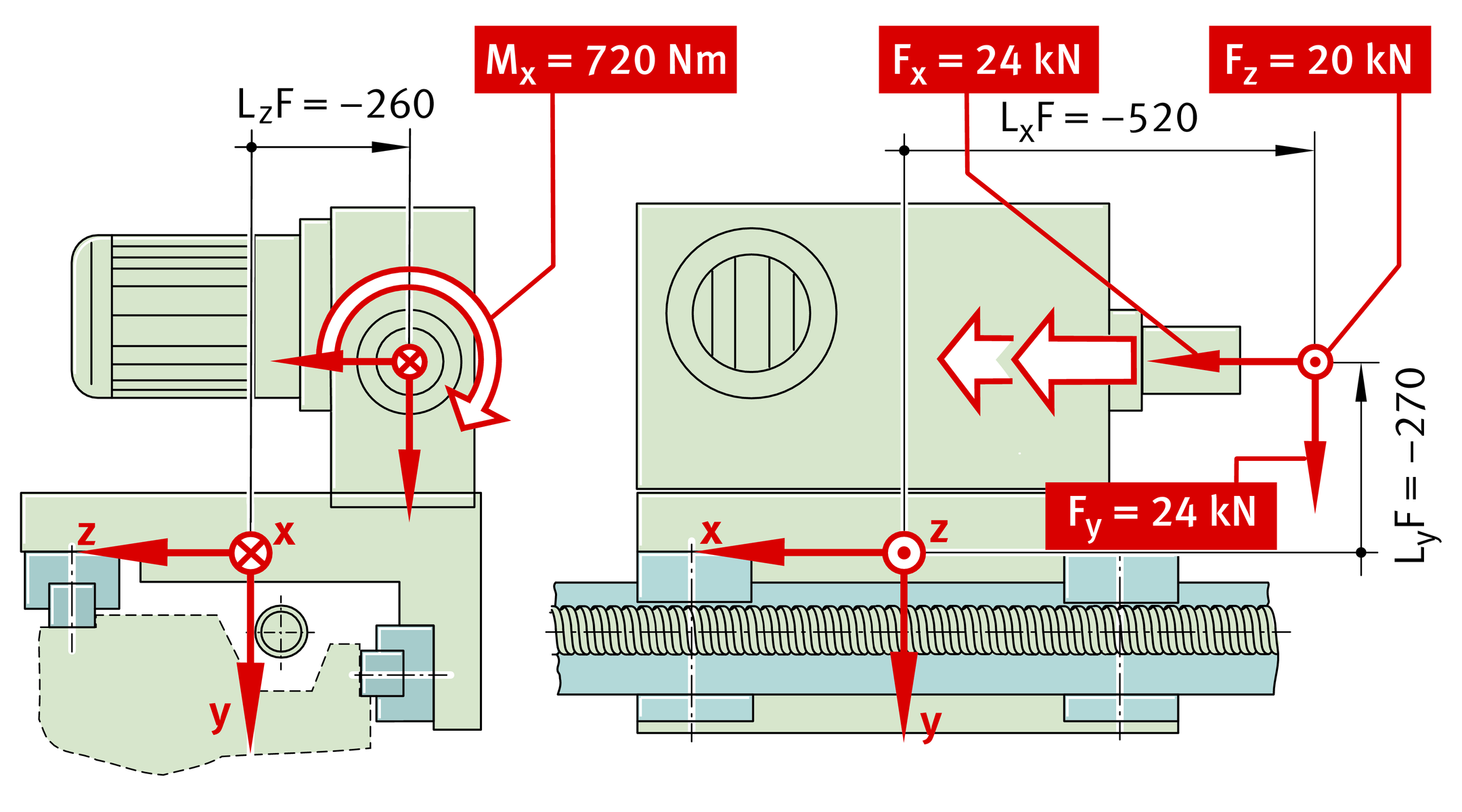
Äußere Belastungen festlegen
Äußere Belastungen, zum Beispiel Bearbeitungskräfte auf den Lineartisch, werden bezogen auf das Tisch-Koordinatensystem angegeben.
Angegeben werden muss, ➤ Bild :
- In welchem der definierten Lastfälle die Belastung auf das Tisch-Koordinatensystem wirkt
- Die Lage ihres Angriffspunktes
- Die Kraft- und Momentenkomponenten.
Äußere Belastungen festlegen
7. Schritt
Lastkollektiv festlegen
Um den Arbeitszyklus der Maschine abzubilden, muss ein Lastkollektiv beschrieben werden. Dieses setzt sich aus den Bewegungsgrößen der Maschine und deren Belastung durch äußere Kräfte (zum Beispiel Bearbeitungskräfte) zusammen.
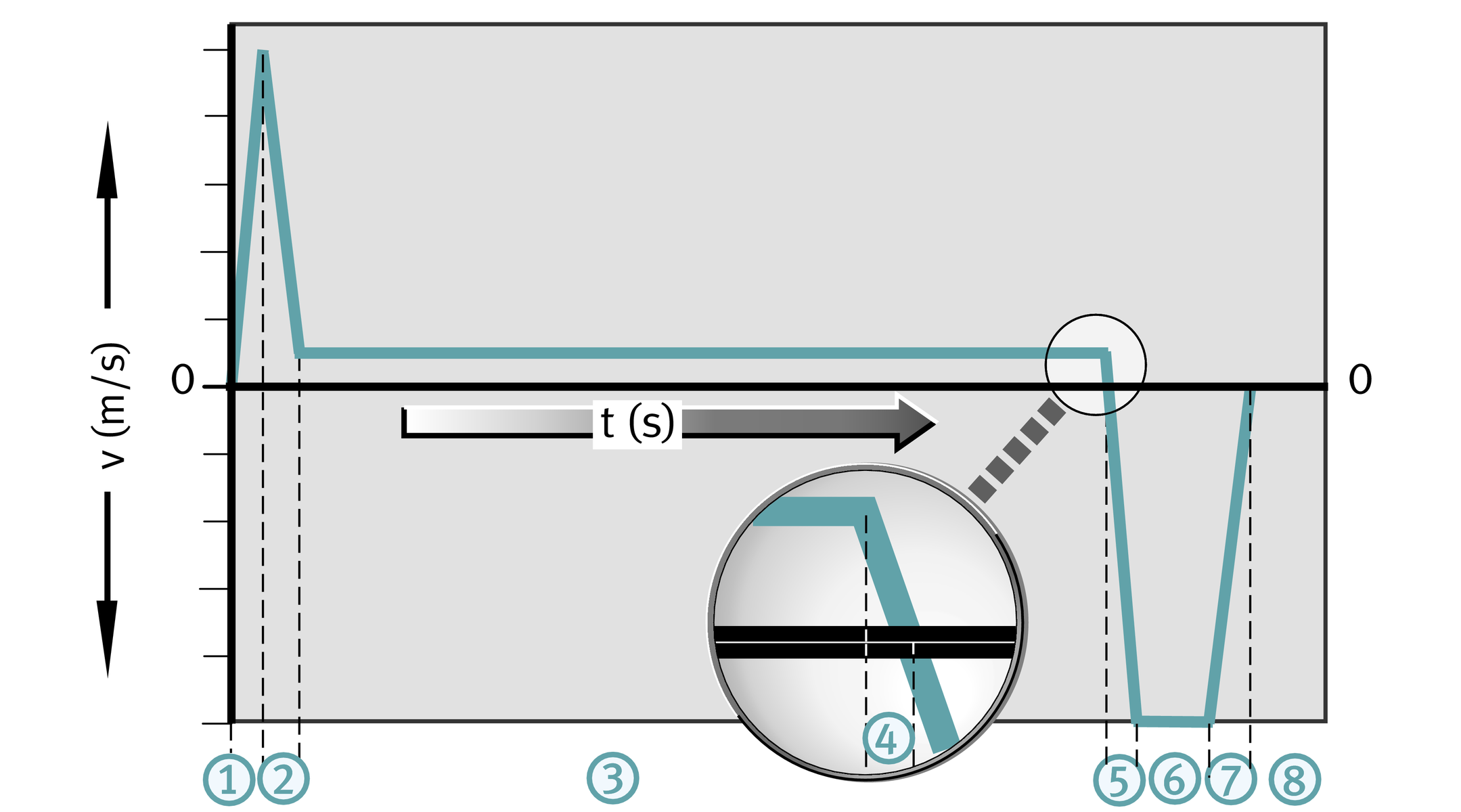
Hierzu sollte anhand eines Geschwindigkeit-Zeit-Diagramms eine sinnvolle Einteilung des Arbeitszyklus in einzelne Lastfälle ermittelt werden, ➤ Bild,

Mit Hilfe der Basisbewegungsgleichungen für gleichförmige Bewegung (v = const.) beziehungsweise gleichförmige Beschleunigung (a = const.) können fehlende Größen (Weg, Beschleunigung) ermittelt werden.
Lastkollektiv festlegen
Weg
Geschwindigkeit
Beschleunigung
Beispiel für den Verlauf eines Linearschlittens
Im folgenden, vereinfachten Beispiel ist der Bewegungsverlauf eines Linearschlittens beschrieben. Betrachtet werden dabei acht Lastfälle, ➤ Bild, Kreisziffern
Komplexe Verläufe können unter Umständen durch Zusammenfassen sinnvoll reduziert werden. Sprechen Sie hierzu bitte den Ingenieurdienst von Schaeffler an.
Eilgang zur Bearbeitungsposition
Beschleunigung
In t1 (0,05 s) auf v1 (0,5 m/s), ➤ Bild,

Verzögerung
In t2 (0,045 s) auf v2 (0,05 m/s), ➤ Bild,

Bearbeitung
Konstante Geschwindigkeit
v3 (0,05 m/s) für t3 (1,105 s); zusätzliche Wirkung der Bearbeitungskraft, ➤ Bild,

Bearbeitungskraft
Lage:
- x = –520 mm
- y = –270 mm
- z = –260 mm.
Größe:
- Mx = 720 Nm
- Fx = 24 kN
- Fy = 24 kN
- Fz = 20 kN.
Verzögerung
In t4 (0,0025 s) auf v4 (0 m/s), ➤ Bild,

Eilgang zurück in die Ausgangsposition
Beschleunigung
In t5 (0,025) auf v5 (–0,5 m/s); entgegengesetzte Richtung, ➤ Bild,

Konstante Geschwindigkeit
v6 (–0,5 m/s) für t6 (0,135 s); entgegengesetzte Richtung, ➤ Bild,


Verzögerung
In t7 (0,0257 s) auf v7 (0 m/s), ➤ Bild,


Stillstand in der Ausgangsposition
Dauer
t8 (1,5 s), v8 (0 m/s), ➤ Bild,
| ti | s | Dauer des Zeitintervalls i |
| si | mm | Wegposition am Ende des Intervalls i |
| vi | m/s | Geschwindigkeit am Ende des Intervalls i |
| ai | m/s2 | Beschleunigung während des Intervalls i. |